探索如何将 Android Things 与 Tensorflow 集成起来,以及如何应用机器学习到物联网系统上。学习如何在装有 Android Things 的树莓派上使用 Tensorflow 进行图片分类。
这个项目探索了如何将机器学习应用到物联网上。具体来说,物联网平台我们将使用 Android Things,而机器学习引擎我们将使用 Google TensorFlow。
现如今,Android Things 处于名为 Android Things 1.0 的稳定版本,已经可以用在生产系统中了。如你可能已经知道的,树莓派是一个可以支持 Android Things 1.0 做开发和原型设计的平台。本教程将使用 Android Things 1.0 和树莓派,当然,你可以无需修改代码就能换到其它所支持的平台上。这个教程是关于如何将机器学习应用到物联网的,这个物联网平台就是 Android Things Raspberry Pi。
物联网上的机器学习是最热门的话题之一。要给机器学习一个最简单的定义,可能就是 维基百科上的定义:
机器学习是计算机科学中,让计算机不需要显式编程就能去“学习”(即,逐步提升在特定任务上的性能)使用数据的一个领域。
换句话说就是,经过训练之后,那怕是它没有针对它们进行特定的编程,这个系统也能够预测结果。另一方面,我们都知道物联网和联网设备的概念。其中前景最看好的领域之一就是如何在物联网上应用机器学习,构建专家系统,这样就能够去开发一个能够“学习”的系统。此外,还可以使用这些知识去控制和管理物理对象。在深入了解 Android Things 的细节之前,你应该先将其安装在你的设备上。如果你是第一次使用 Android Things,你可以阅读一下这篇如何在你的设备上安装 Android Things 的教程。
这里有几个应用机器学习和物联网产生重要价值的领域,以下仅提到了几个有趣的领域,它们是:
- 在工业物联网(IIoT)中的预见性维护
- 消费物联网中,机器学习可以让设备更智能,它通过调整使设备更适应我们的习惯
在本教程中,我们希望去探索如何使用 Android Things 和 TensorFlow 在物联网上应用机器学习。这个 Adnroid Things 物联网项目的基本想法是,探索如何去构建一个能够识别前方道路上基本形状(比如箭头)并控制其道路方向的无人驾驶汽车。我们已经介绍了 如何使用 Android Things 去构建一个无人驾驶汽车,因此,在开始这个项目之前,我们建议你去阅读那个教程。
这个机器学习和物联网项目包含如下的主题:
- 如何使用 Docker 配置 TensorFlow 环境
- 如何训练 TensorFlow 系统
- 如何使用 Android Things 去集成 TensorFlow
- 如何使用 TensorFlow 的成果去控制无人驾驶汽车
这个项目起源于 Android Things TensorFlow 图像分类器。
我们开始吧!
如何使用 Tensorflow 图像识别
在开始之前,需要安装和配置 TensorFlow 环境。我不是机器学习方面的专家,因此,我需要找到一些快速而能用的东西,以便我们可以构建 TensorFlow 图像识别器。为此,我们使用 Docker 去运行一个 TensorFlow 镜像。以下是操作步骤:
1、 克隆 TensorFlow 仓库:
git clone https://github.com/tensorflow/tensorflow.git
cd /tensorflow
git checkout v1.5.0
2、 创建一个目录(/tf-data),它将用于保存这个项目中使用的所有文件。
3、 运行 Docker:
docker run -it
--volume /tf-data:/tf-data
--volume /tensorflow:/tensorflow
--workdir /tensorflow tensorflow/tensorflow:1.5.0 bash
使用这个命令,我们运行一个交互式 TensorFlow 环境,可以挂载一些在使用项目期间使用的目录。
如何训练 TensorFlow 去识别图像
在 Android Things 系统能够识别图像之前,我们需要去训练 TensorFlow 引擎,以使它能够构建它的模型。为此,我们需要去收集一些图像。正如前面所言,我们需要使用箭头来控制 Android Things 无人驾驶汽车,因此,我们至少要收集四种类型的箭头:
- 向上的箭头
- 向下的箭头
- 向左的箭头
- 向右的箭头
为训练这个系统,需要使用这四类不同的图像去创建一个“知识库”。在 /tf-data 目录下创建一个名为 images 的目录,然后在它下面创建如下名字的四个子目录:
up-arrowdown-arrowleft-arrowright-arrow
现在,我们去找图片。我使用的是 Google 图片搜索,你也可以使用其它的方法。为了简化图片下载过程,你可以安装一个 Chrome 下载插件,这样你只需要点击就可以下载选定的图片。别忘了多下载一些图片,这样训练效果更好,当然,这样创建模型的时间也会相应增加。
扩展阅读
打开浏览器,开始去查找四种箭头的图片:
每个类别我下载了 80 张图片。不用管图片文件的扩展名。
为所有类别的图片做一次如下的操作(在 Docker 界面下):
python /tensorflow/examples/image_retraining/retrain.py
--bottleneck_dir=tf_files/bottlenecks
--how_many_training_steps=4000
--output_graph=/tf-data/retrained_graph.pb
--output_labels=/tf-data/retrained_labels.txt
--image_dir=/tf-data/images
这个过程你需要耐心等待,它需要花费很长时间。结束之后,你将在 /tf-data 目录下发现如下的两个文件:
retrained_graph.pbretrained_labels.txt
第一个文件包含了 TensorFlow 训练过程产生的结果模型,而第二个文件包含了我们的四个图片类相关的标签。
如何测试 Tensorflow 模型
如果你想去测试这个模型,去验证它是否能按预期工作,你可以使用如下的命令:
python scripts.label_image
--graph=/tf-data/retrained-graph.pb
--image=/tf-data/images/[category]/[image_name.webp]
优化模型
在 Android Things 项目中使用我们的 TensorFlow 模型之前,需要去优化它:
python /tensorflow/python/tools/optimize_for_inference.py
--input=/tf-data/retrained_graph.pb
--output=/tf-data/opt_graph.pb
--input_names="Mul"
--output_names="final_result"
那个就是我们全部的模型。我们将使用这个模型,把 TensorFlow 与 Android Things 集成到一起,在物联网或者更多任务上应用机器学习。目标是使用 Android Things 应用程序智能识别箭头图片,并反应到接下来的无人驾驶汽车的方向控制上。
如果你想去了解关于 TensorFlow 以及如何生成模型的更多细节,请查看官方文档以及这篇 教程。
如何使用 Android Things 和 TensorFlow 在物联网上应用机器学习
TensorFlow 的数据模型准备就绪之后,我们继续下一步:如何将 Android Things 与 TensorFlow 集成到一起。为此,我们将这个任务分为两步来完成:
- 硬件部分,我们将把电机和其它部件连接到 Android Things 开发板上
- 实现这个应用程序
Android Things 示意图
在深入到如何连接外围部件之前,先列出在这个 Android Things 项目中使用到的组件清单:
- Android Things 开发板(树莓派 3)
- 树莓派摄像头
- 一个 LED 灯
- LN298N 双 H 桥电机驱动模块(连接控制电机)
- 一个带两个轮子的无人驾驶汽车底盘
我不再重复 如何使用 Android Things 去控制电机 了,因为在以前的文章中已经讲过了。
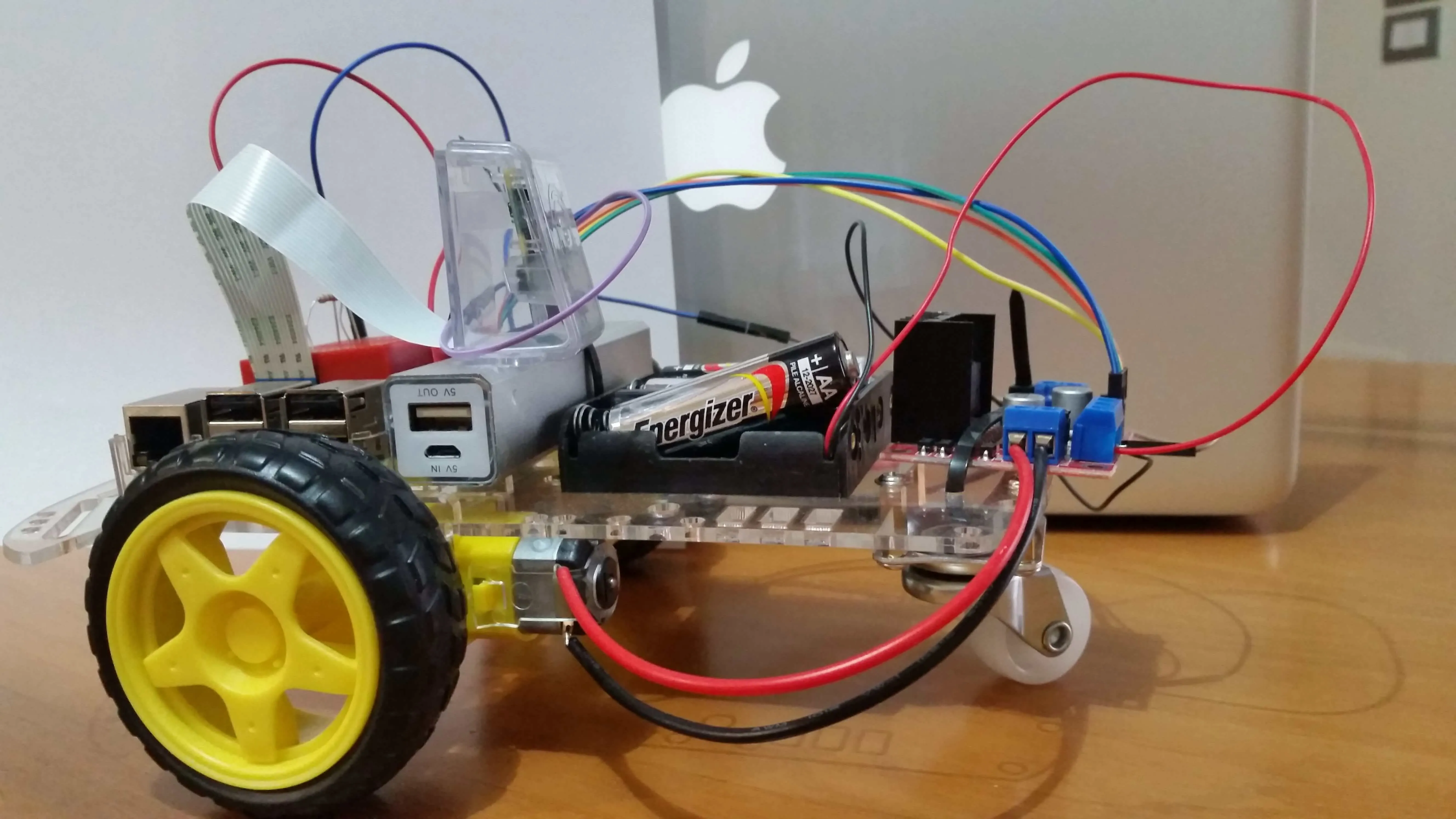
下面是示意图:
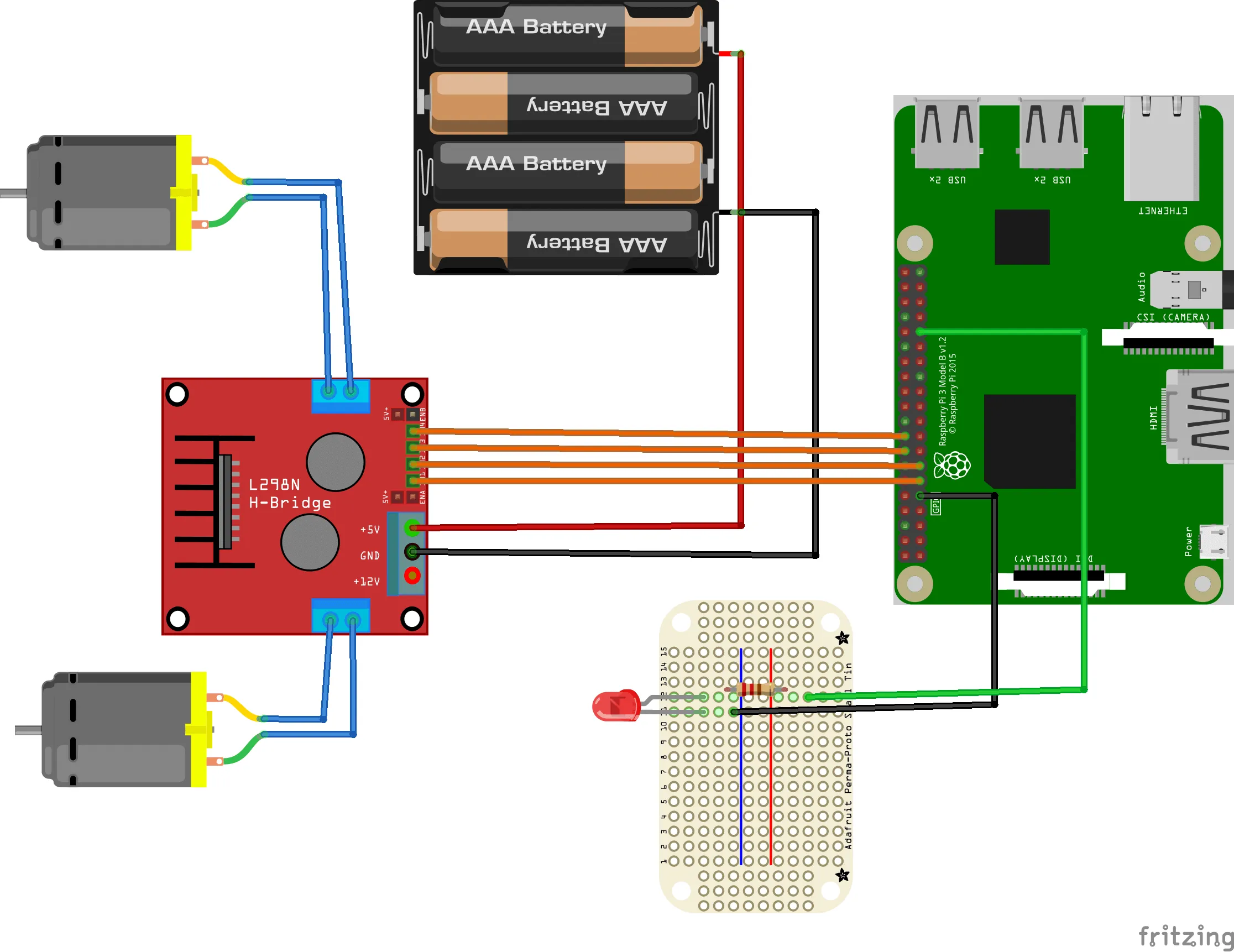
上图中没有展示摄像头。最终成果如下图:
使用 TensorFlow 实现 Android Things 应用程序
最后一步是实现 Android Things 应用程序。为此,我们可以复用 Github 上名为 TensorFlow 图片分类器示例 的示例代码。开始之前,先克隆 Github 仓库,这样你就可以修改源代码。
这个 Android Things 应用程序与原始的应用程序是不一样的,因为:
- 它不使用按钮去开启摄像头图像捕获
- 它使用了不同的模型
- 它使用一个闪烁的 LED 灯来提示,摄像头将在 LED 停止闪烁后拍照
- 当 TensorFlow 检测到图像时(箭头)它将控制电机。此外,在第 3 步的循环开始之前,它将打开电机 5 秒钟。
为了让 LED 闪烁,使用如下的代码:
private Handler blinkingHandler = new Handler();
private Runnable blinkingLED = new Runnable() {
@Override
public void run() {
try {
// If the motor is running the app does not start the cam
if (mc.getStatus())
return ;
Log.d(TAG, "Blinking..");
mReadyLED.setValue(!mReadyLED.getValue());
if (currentValue <= NUM_OF_TIMES) {
currentValue++;
blinkingHandler.postDelayed(blinkingLED,
BLINKING_INTERVAL_MS);
}
else {
mReadyLED.setValue(false);
currentValue = 0;
mBackgroundHandler.post(mBackgroundClickHandler);
}
} catch (IOException e) {
e.printStackTrace();
}
}
};
当 LED 停止闪烁后,应用程序将捕获图片。
现在需要去关心如何根据检测到的图片去控制电机。修改这个方法:
@Override
public void onImageAvailable(ImageReader reader) {
final Bitmap bitmap;
try (Image image = reader.acquireNextImage()) {
bitmap = mImagePreprocessor.preprocessImage(image);
}
final List<Classifier.Recognition> results =
mTensorFlowClassifier.doRecognize(bitmap);
Log.d(TAG,
"Got the following results from Tensorflow: " + results);
// Check the result
if (results == null || results.size() == 0) {
Log.d(TAG, "No command..");
blinkingHandler.post(blinkingLED);
return ;
}
Classifier.Recognition rec = results.get(0);
Float confidence = rec.getConfidence();
Log.d(TAG, "Confidence " + confidence.floatValue());
if (confidence.floatValue() < 0.55) {
Log.d(TAG, "Confidence too low..");
blinkingHandler.post(blinkingLED);
return ;
}
String command = rec.getTitle();
Log.d(TAG, "Command: " + rec.getTitle());
if (command.indexOf("down") != -1)
mc.backward();
else if (command.indexOf("up") != -1)
mc.forward();
else if (command.indexOf("left") != -1)
mc.turnLeft();
else if (command.indexOf("right") != -1)
mc.turnRight();
}
在这个方法中,当 TensorFlow 返回捕获的图片匹配到的可能的标签之后,应用程序将比较这个结果与可能的方向,并因此来控制电机。
最后,将去使用前面创建的模型了。拷贝 assets 文件夹下的 opt_graph.pb 和 reatrained_labels.txt 去替换现在的文件。
打开 Helper.java 并修改如下的行:
public static final int IMAGE_SIZE = 299;
private static final int IMAGE_MEAN = 128;
private static final float IMAGE_STD = 128;
private static final String LABELS_FILE = "retrained_labels.txt";
public static final String MODEL_FILE = "file:///android_asset/opt_graph.pb";
public static final String INPUT_NAME = "Mul";
public static final String OUTPUT_OPERATION = "output";
public static final String OUTPUT_NAME = "final_result";
运行这个应用程序,并给摄像头展示几种箭头,以检查它的反应。无人驾驶汽车将根据展示的箭头进行移动。
总结
教程到此结束,我们讲解了如何使用 Android Things 和 TensorFlow 在物联网上应用机器学习。我们使用图片去控制无人驾驶汽车的移动。
作者:Francesco Azzola 译者:qhwdw 校对:wxy
发表回复